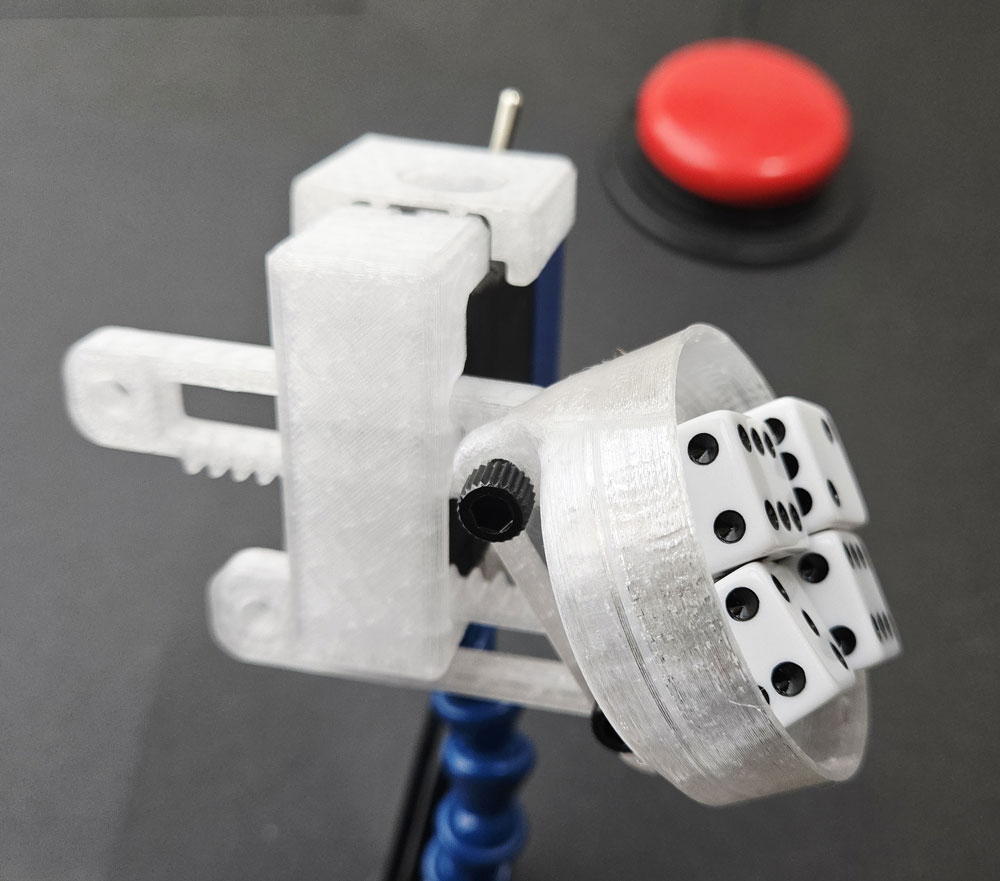
LINEAR MOTION: GAME ASSISTANCE KIT
LESSON SNAPSHOT
| Kit | Linear Motion: Game Assistance Kit - Student Guide #5 |
|---|---|
| Client | James Parker, Age 28 - Needs a dice-rolling device for independent game participation due to limited grip strength from a brachial plexus injury |
| Core Concept | Motion transformation through rack and pinion mechanics |
| Prerequisites | Getting Started Guide, basic servo programming, previous kits introducing mechanical systems |
| Student Guide | tinyurl.com/SS-STL-DICE |
⚠️ Safety Considerations
- Tapping threads requires controlled force - supervise proper tap handle technique to prevent slipping and potential hand injuries.
- Lubrication with soap creates slippery surfaces - have students wipe hands before handling electronic components.
- Gear mesh points can pinch - caution during assembly when working rack teeth over the drive gear.
What This Kit Teaches
Engineering/Design Focus: This kit introduces motion transformation systems, specifically rack and pinion mechanics that convert rotary servo movement into linear tipping action. Students explore the fundamental engineering challenge of transforming the motion available (rotation) into the motion needed (linear sliding), while understanding the precision and reversibility advantages of gear-based systems compared to alternatives like cam mechanisms or lead screws.
Human-Centered Design Connection: James needs to participate independently in social activities that are meaningful to his work and personal life. The dice roller addresses both the physical challenge (inability to grip and shake dice) and the social dimension (feeling left out when others must roll for him), demonstrating how assistive technology enables participation rather than just solving mechanical problems.
Standards at a Glance: Primary domains are CAD, HCD, NGSS, STEL - See page 5 for complete alignment
ESSENTIAL TEACHING MOMENTS
These are the key concepts worth pausing to discuss during the lesson. They align with steps in the student guide.
Moment 1: Motion Transformation Principle
Student Guide Reference: Steps 8-9 (meshing the gears) and "The Bigger Picture" section
Core Idea: Rotary motion from the servo must be converted into linear motion for the tipping action because most tasks require different motion types than motors naturally produce.
Why It Matters: Understanding motion transformation is fundamental to mechanical design - it appears in steering systems, 3D printers, and countless machines students encounter daily.
Discussion Prompts to Consider:
- "The servo can only spin. What type of motion does James need for tipping dice?"
- "Why can't we just attach the cup directly to the servo horn?"
- "Where else have you seen spinning motion converted to pushing or sliding motion?"
Watch For: Students may not immediately recognize that the racks are moving in a straight line even though they're following a circular gear. Emphasize that "linear" means straight-line motion, regardless of whether something curves slightly during that motion.
Moment 2: Gear Mesh and Precision
Student Guide Reference: Steps 6-9 (pressing racks, positioning, meshing gears)
Core Idea: The tight interlocking of gear teeth prevents slipping and ensures precise, predictable motion without backlash or wobble.
Why It Matters: Precision matters for reliability - James needs the device to tip consistently every time, and gear systems provide this repeatable accuracy.
Discussion Prompts to Consider:
- "What would happen if the teeth didn't mesh tightly?"
- "Why is lubrication important even though we want tight contact?"
- "How does the rack and pinion compare to just pushing the cup with a smooth surface?"
Extension Opportunity: If time allows, have students test the system with varying amounts of lubrication to observe how friction affects smooth operation without compromising the mesh.
Moment 3: System Testing and Optimization
Student Guide Reference: Step 11 (testing device) and programming adjustments
Core Idea: The initial build may tip too fast, too slow, or at the wrong angle - iterative testing reveals what parameters need adjustment in both hardware and code.
Why It Matters: Real engineering involves optimization through testing, not just following instructions. James's actual dice (weight, quantity) and game contexts will require customization.
Discussion Prompts to Consider:
- "If dice are spilling out too quickly, what could we adjust in the code?"
- "What physical modifications might help with different dice sizes or quantities?"
- "How would you test this with James to find the optimal tipping speed and angle?"
Demo/Visual Aid Suggestion: Demonstrate the device with different numbers and types of dice (standard six-sided, larger polyhedral dice) to show how load affects performance and why testing with actual use conditions matters.
Moment 4: Participation Through Independence
Student Guide Reference: Client profile and closing reflection questions
Core Idea: This device enables social participation by allowing James to control his own dice rolls, addressing both the physical task and the emotional impact of needing assistance.
Why It Matters: Assistive technology succeeds when it considers the full human context - James's goal isn't just rolling dice, it's participating independently in social activities central to his personal and professional life.
Discussion Prompts to Consider:
- "How does controlling your own dice roll differ from having someone else roll for you?"
- "What follow-up questions might you ask James about the games he plays most often?"
- "Beyond board games, where else might James encounter similar challenges with manipulating small objects?"
MATERIALS & PREPARATION
What Students Need
- Kit components: Rack Cover, Racks (2), Tilt Cup, Drive Gear (12T), M5 Socket Screws
- Tools from previous kits: M5 Tap & Tap Handle, Smart Servo, 4mm Allen Key, Phillips Screwdriver, Mounting Screws
- Lubrication material: bar soap (small bar for student groups to share)
- Safety equipment: none specifically required, but supervise tapping operations
- Testing materials: standard six-sided dice (provide variety of dice types if available)
What You Need to Prepare
- Pre-build one kit to identify assembly challenges, particularly the rack press-fit and gear meshing alignment
- Prepare visual aids showing rack and pinion examples (photos of car steering system cutaway, 3D printer mechanism, or camera tripod)
- Review student guide pages on motion transformation and gear mesh principles
- Set up workstations with organized materials and adequate workspace for rack assembly
- Test lubrication method - confirm that bar soap provides sufficient lubrication without making parts too slippery
- Prepare variety of dice for testing (standard six-sided, larger polyhedral if available)
- Choose assessment approach (see page 4)
- Select extension activities if time allows (see page 4)
Quick Troubleshooting Reference
| If students struggle with... | First, check... | Then try... |
|---|---|---|
| Racks won't snap onto Rack Cover | Rack orientation (teeth-side-in) and alignment | Guide students to flex racks gently while pressing, ensuring even pressure across the length |
| Racks don't slide smoothly | Insufficient lubrication or misalignment | Add more soap to contact surfaces; verify racks aren't binding at extreme positions |
| Gears won't mesh properly | Initial servo position and rack position at extremes | Reset servo to 0 degrees via code, then position racks at their furthest point before meshing |
| Tilt Cup attachment loose | Socket screws not reaching tapped holes or overtightened | Verify screws slide freely in cup slots while still engaging threaded holes in racks |
| Motion too fast or jerky | Code parameters (delay/steps variables) | Guide students to adjust timing in code systematically, testing after each change |
TEACHING PROGRESSION
The student guide provides detailed assembly and content. Use this framework to structure your instruction around their independent work.
1. ENGAGE: Understanding the Challenge
Learning Focus: Students understand James's need for independence in social participation and identify the motion transformation problem.
Suggested Activities
Client Introduction:
- Have students read James's profile in their guide
- Consider: Have students attempt to roll dice without using their hands (elbow, hip, edge of table) to experience the constraint
- Discuss: What makes this challenging beyond the physical act? How does needing help affect game participation?
Problem Framing:
- Guide students to articulate: "James needs a way to roll dice independently because limited grip strength prevents him from participating fully in social game activities"
- Connect to broader accessibility: dice manipulation appears simple but requires coordinated fine motor control
- Preview: How might we transform the servo's spinning motion into the tipping motion needed?
Formative Assessment Ideas
- Can students explain both the physical and social dimensions of James's challenge?
- Do they recognize this as a motion transformation problem (spinning to tipping)?
- Do they see parallels to other assistive technology needs in recreation and social activities?
Standards Connection: Primary: HCD #1 (Problem Framing), STEL 1Q (Research to inform design), NGSS ETS1 (Define design problems), STEL 7S (Human factors in design)
2. EXPLORE: Building & Discovering
Learning Focus: Students develop fabrication skills with rack and pinion systems and observe how gear mechanics create precise linear motion.
Facilitation Approach
Before Building:
- Students complete Steps 1-2 (identify components, gather tools)
- Consider: Prediction activity - "How do you think the racks and drive gear will work together to create tipping motion?"
- Review safety for tapping operations (controlled force, steady hands, proper positioning)
During Building:
- Students follow detailed assembly in their guide
- Use Essential Teaching Moments (page 2) as strategic pause points:
- At Step 6 (pressing racks): Pause to discuss why the racks flex and snap - this is compliant assembly design
- At Steps 8-9 (meshing gears): Use Teaching Moment #2 to explore gear precision and why tight mesh matters
- At Step 10 (tilt cup attachment): Discuss why socket screws must slide in slots (accommodating slight motion variation)
- Circulate to observe tapping technique and gear meshing accuracy
- Encourage troubleshooting lubrication issues before providing solutions
Testing Phase:
- Guide systematic observation: "How far does the cup tip? How smoothly does it move? How consistent is the motion?"
- Consider: Have students test with different numbers of dice (1, 3, 6, 10) to observe load effects
- Preview optimization needs for next phase (speed adjustments, angle refinement)
Formative Assessment Ideas
- Are students tapping threads with controlled force and proper technique?
- Can they explain how the rack teeth and gear teeth interact to create linear motion?
- Are they making careful observations about motion quality (smoothness, consistency, speed)?
- Do they connect the mechanical operation to James's needs (reliable, repeatable tipping)?
Standards Connection: Primary: CAD 1.1 (Technical vocabulary), CAD 1.2 (Assembly/fabrication with precise gear mesh), NGSS Practice 3 (Planning investigations through systematic testing), STEL 2M (Systems thinking - input/process/output)
3. EXPLAIN: Making Sense of Concepts
Learning Focus: Students connect their hands-on experience with rack and pinion mechanics to broader concepts of motion transformation and mechanical precision.
Suggested Sequence
Process the Experience:
- Reflection: "What surprised you during assembly? Where did precision matter most?"
- Introduce key vocabulary using completed assembly as reference: motion transformation, rack and pinion, linear motion, rotary motion, backlash, precision, reversibility
- Consider: Have students trace the motion path with their fingers while explaining it aloud
Explore Core Concepts:
- Use content from student guide's "The Bigger Picture" section on motion transformation
- Ground abstract ideas in what they just built: "Your servo spins. Your cup tips. The rack and pinion transformed that motion."
- Provide visual aids: photos of car steering systems, 3D printer mechanisms, camera tripod adjustments
- Extend to real-world examples: "Where else do you see spinning motion converted to pushing or sliding?"
Teaching Strategies to Consider:
- Think-pair-share with technical vocabulary: one student explains rack and pinion to their partner using only the terms introduced
- Annotate their assembly with labels: "rotary motion here," "linear motion here," "mesh point"
- Compare/contrast with other motion transformation methods mentioned in the guide (cam mechanisms, lead screws)
- Identify examples of rack and pinion in everyday objects students have encountered
Connect to User Needs:
- Discuss: How does rack and pinion precision help James? Why does consistent, repeatable motion matter?
- Analyze design trade-offs: What are the advantages of gear-based transformation? What are the limitations?
- Consider optimization for specific contexts: different dice types, varying game situations, portability needs
Formative Assessment Ideas
- Can students define motion transformation and explain it using their device as an example?
- Can they explain why rack and pinion provides better precision than other methods?
- Do they connect technical features (gear mesh, lubrication, reversibility) to user benefits (reliability, consistency)?
- Can they identify trade-offs in the design (complexity vs. precision, cost vs. reliability)?
Standards Connection: Primary: CAD 1.4 (Explain technical solutions using appropriate vocabulary), HCD #2 (Communicate features in user-friendly terms), NGSS Cross-Cutting Concepts (Cause and effect, Structure and function), STEL 2M (Systems components and interactions)
4. ELABORATE: Extension & Application
Learning Focus: Students apply motion transformation concepts to new contexts, optimize the dice roller design, or explore related mechanical challenges.
Extension Menu
Choose based on available time, student readiness, and learning priorities
Option A: Dice Roller Optimization
- What Students Do: Modify the device for specific game contexts James mentioned or other board game applications
- Skills Developed: Design iteration based on user feedback, parametric thinking, contextual reasoning
- Possible Deliverables: Modified device with documentation, comparison chart of original vs. optimized performance
- Good For: Reinforcing iterative design and user-centered thinking
- Time Estimate: 30-45 minutes
- Standards: HCD #8 (Iteration cycles), STEL 3F (Apply to another setting), STEL 5G (Evaluate trade-offs)
Option B: Motion Transformation Transfer Challenge
- What Students Do: Design a different assistive device that requires converting rotary motion to linear motion (e.g., page turner, drawer opener)
- Skills Developed: Analogical reasoning, creative problem-solving, knowledge transfer
- Possible Deliverables: Concept sketch with labeled motion types, comparison of mechanical approach to dice roller
- Good For: Deepening conceptual understanding of motion transformation principles
- Time Estimate: 40-60 minutes
- Standards: STEL 3H (Transfer knowledge), STEL 1M (Creative solutions), HCD #3 (Innovation process)
Option C: Computational Speed Control
- What Students Do: Modify code to create variable-speed tipping controlled by multiple button presses or timed delays
- Skills Developed: Computational thinking, algorithm design, testing and debugging
- Possible Deliverables: Modified code with documentation explaining speed control logic, demo video
- Good For: Technology integration and advanced programming practice
- Time Estimate: 30-45 minutes
- Standards: CSTA (Control structures and conditional logic), NGSS Practice 5 (Using computational thinking)
Option D: Mechanical Advantage Analysis
- What Students Do: Calculate gear ratios, measure tipping angles, and analyze force transmission through the system
- Skills Developed: Mathematical modeling, quantitative reasoning, data collection
- Possible Deliverables: Calculations with annotations, optimization proposal based on measured data
- Good For: Math integration and engineering analysis
- Time Estimate: 45-60 minutes
- Standards: NGSS Practice 5 (Using mathematics), STEL 2S (Quantify concepts), CAD 2.4 (Geometric analysis)
Option E: Accessibility in Recreation Research
- What Students Do: Research ADA requirements for accessible gaming equipment or interview people about barriers to recreational participation
- Skills Developed: Research skills, making broader social connections, empathy development
- Possible Deliverables: Short presentation, infographic on accessibility in recreation, interview summary
- Good For: Social studies or ELA integration, building empathy
- Time Estimate: 60-90 minutes (includes research/interview time)
- Standards: STEL 7S (Social/cultural impacts), HCD #1 (Broader context), HCD Tool 1.1 (Interview)
Differentiation Through Choice
- Guided Support: Options A or D with templates, measurement guides, and worked examples
- Open-Ended: Options B or E with minimal scaffolding and student-directed exploration
- Student Interest: Allow choice based on individual goals (mechanical focus, coding focus, social impact focus)
5. EVALUATE: Demonstrating Learning
Learning Focus: Students demonstrate competency in motion transformation concepts and reflect on design for accessibility.
Recommended Assessment: Performance Demonstration with Technical Explanation
What Students Do: Successfully build and test the device, then explain how rack and pinion mechanics solve James's challenge
What You Assess: Assembly accuracy (proper gear mesh, smooth operation), technical explanation (motion transformation concepts), connection to user needs (how features serve James)
Evidence: Completed functional device + verbal or written explanation addressing:
- How rotary motion becomes linear motion in their device
- Why rack and pinion provides advantages for this application
- How specific design features address James's needs and context
- What optimization they would recommend after testing
Time Required: Ongoing building + 3-5 minutes for explanation per student/group
Best For: Authentic, hands-on demonstration integrating mechanical skills and conceptual understanding
Alternative Assessment Options
Option 2: Technical Documentation Portfolio
- What Students Do: Create documentation including client needs analysis, assembly notes with motion diagrams, technical explanation of rack and pinion operation, and optimization recommendations
- What You Assess: Problem framing quality, technical vocabulary use, conceptual clarity, user-centered reasoning
- Evidence: Multi-component portfolio with photos, labeled diagrams, and written explanations
Option 3: Design Improvement Proposal
- What Students Do: Test the device systematically, identify limitations, and propose modifications for specific game contexts or user preferences
- What You Assess: Testing methodology, technical reasoning, feasibility of proposals, connection to user needs
- Evidence: Written or visual proposal with justification based on testing data and mechanical principles
Reflection Prompts
Choose 2-3 based on your learning priorities
- Process: What was the most challenging part of assembly? How did you troubleshoot when things didn't work as expected?
- Concept: Explain motion transformation to someone who hasn't built this device. Why is it important in mechanical design?
- Impact: How does this device change James's game night experience beyond just rolling dice? What does independence mean in social contexts?
- Transfer: Where else could you apply rack and pinion mechanics? What other motion transformation problems have you encountered?
- Growth: What did you learn about precision in mechanical systems? How did this project change your understanding of assistive technology?
Standards Connection: Assessment should provide evidence of: CAD 1.1-1.4 (Technical competencies), HCD #2, #8, #9 (Communication, iteration, documentation), NGSS Practices (Developing models, planning investigations, constructing explanations), STEL standards addressed throughout
CONNECTIONS & CONTEXT
Learning Sequence
What Students Already Know (from previous kits):
Basic servo control and programming, mechanical assembly with threaded fasteners, concept of user-centered design, previous exposure to simple mechanisms (possibly gears from Kit 3 if following sequence)
What's New in This Kit:
Motion transformation as an engineering principle, rack and pinion mechanics specifically, concept of linear motion vs. rotary motion, importance of precision and gear mesh, lubrication in mechanical systems, optimization through code parameter adjustment
Where This Leads (in future kits):
More complex motion transformations, multi-axis systems, compound mechanisms, advanced control systems, integration of sensors for adaptive behavior
Cumulative Skills Being Reinforced:
Iterative testing and refinement, connecting technical features to user benefits, systematic troubleshooting, threading/tapping operations, documentation of design decisions, translating client needs into technical requirements
Cross-Curricular Connections
Mathematics
Gear ratios and proportional relationships in the rack and pinion system (number of teeth, rotation angle to linear distance). Measurement and optimization during testing (tipping angle, distance traveled, timing). Geometric analysis of motion paths and positioning.
Science
Forces and motion (NGSS): transformation of rotary force to linear force through mechanical advantage. Friction as both challenge (requires lubrication) and necessity (provides grip in gear mesh). Energy transfer through mechanical systems from electrical input to physical motion.
Social Studies
ADA requirements for accessible recreation and gaming equipment. History of assistive technology development and disability rights movement. Social model of disability - barriers to participation created by environment/design rather than by people.
English/Language Arts
Technical writing in documentation and user instructions. Persuasive writing in design proposals and optimization recommendations. Client communication requiring translation of technical concepts to accessible language.
APPENDIX
Complete Standards Alignment
CAD Competencies
| Code | Competency | Where Addressed | How to Emphasize |
|---|---|---|---|
| CAD 1.1 | Technical vocabulary | Phase 2 (Building) Steps 3-10, Phase 3 (Explain) - Introduce terms with assembly as reference: motion transformation, rack, pinion, linear motion, rotary motion, backlash, gear mesh, precision | Have students create labeled diagrams of their device showing different motion types; use vocabulary in explanations to peers; create glossary with examples from the kit |
| CAD 1.2 | Assembly/fabrication | Phase 2 (Building) Steps 3-10 - Tapping threads, pressing racks onto cover, meshing gears with precision, attaching tilt cup | Observe threading technique; pause to model proper rack press-fit; assess completed assembly for proper gear mesh and smooth operation |
| CAD 1.3 | Technical documentation | Phase 5 (Evaluate) - Portfolio option with assembly notes, motion diagrams, optimization recommendations | Provide exemplars showing clear annotations; emphasize accuracy in describing motion paths and gear interactions; require specific technical vocabulary |
| CAD 1.4 | Explain technical solutions | Phase 3 (Explain), Phase 5 (Evaluate) - Explaining motion transformation and connecting features to user needs | Use sentence frames: "The servo provides rotary motion, which the rack and pinion transforms into..."; require explanation of why precision matters for James; connect technical operation to reliable user experience |
| CAD 2.4 | Geometric analysis | Phase 2 (Testing), Phase 3 (Explain) - Understanding motion paths, gear mesh geometry, tipping angles | Have students trace motion paths and measure tipping angles; discuss how gear tooth geometry creates specific linear distances per rotation; analyze clearances and potential interference points |
| CAD 3.1 | CAD fundamentals | Extension Option A or B - Designing modifications for dice cup or transfer applications | If students design custom components, emphasize proper dimensioning for gear mesh and mounting; model basic sketching and extrusion workflows |
| CAD 3.3 | Assembly modeling | Extension Option A - Modeling modifications to the dice roller system | Guide students to model the rack-pinion relationship; emphasize mate constraints that allow proper linear motion; validate motion through CAD simulation if available |
| CAD 4.2 | 3D Printing | If students design modifications - preparation of components for printing | Discuss support structures needed for gear teeth; emphasize proper orientation for strength; consider wall thickness in printed gears |
CSTA Computer Science Standards
| Code | Standard | Where Addressed | How to Emphasize |
|---|---|---|---|
| Computing Systems: Hardware & Software | Model hardware/software interactions | Phase 2 (Testing), Phase 3 (Explain) - Understanding how code controls servo rotation which mechanically creates tipping | Make system flow visible: button press → code execution → servo rotation → rack motion → cup tipping; create flowcharts showing hardware/software integration |
| Computing Systems: Troubleshooting | Systematically identify and fix problems | Phase 2 (Building/Testing) - Debugging motion issues, code timing, mechanical binding | Use troubleshooting table on page 3; teach systematic approach: isolate mechanical vs. code issues, test one variable at a time, document what was changed |
| Algorithms & Programming: Control | Programming control structures | Extension Option C - Creating variable-speed control with loops and conditionals | Guide implementation of FOR loops for gradual motion; use conditionals for multi-speed options; discuss how control structure choices affect user experience |
HCD Skills & Tools
| Code | Skill/Tool | Where Addressed | How to Emphasize |
|---|---|---|---|
| HCD #1 | Problem Framing | Phase 1 (Engage) - Understanding James's needs in full context (physical + social dimensions) | Use multiple perspectives: physical challenge (grip strength), emotional impact (feeling left out), social context (community center games); identify root cause vs. symptoms |
| HCD #2 | Stakeholder Communication | Phase 3 (Explain), Phase 5 (Evaluate) - Explaining device in user-friendly terms and connecting features to benefits | Practice translating technical language: "The gears transform spinning into tipping" becomes "The device tips your dice cup smoothly and reliably every time you press the button"; focus on benefits James experiences, not just features |
| HCD #5 | Knowledge Development | Phase 2-3 - Learning motion transformation concepts while maintaining project momentum | Make learning visible: "We need to understand gear mesh to make this work reliably"; balance research (what is rack and pinion?) with building (let's see it work); document new knowledge gained |
| HCD #6 | Stakeholder Dialogue | Phase 1 (Engage), Teaching Moment #4, Phase 5 reflection - Understanding and responding to James's needs | Role-play follow-up questions to James about game types, dice preferences, portability needs; consider how feedback would inform design iteration |
| HCD #8 | Iteration Cycles | Phase 2 (Testing), Extension Option A - Testing and optimizing device performance | Emphasize that initial build may need adjustment; document what was tested and what was changed; celebrate learning from issues as progress, not failure |
| HCD #9 | Design Documentation | Phase 5 (Evaluate) - Portfolio option with process documentation | Teach why documentation matters: so others can replicate, so you can remember decisions, so James understands how to use and maintain device; provide clear documentation standards |
| HCD Tool 1.2 | Problem Statement | Phase 1 (Engage) - Framing James's challenge precisely | Use template: "James needs a device that can tip dice reliably because limited grip strength prevents him from participating independently in social game activities"; test problem statements for specificity |
| HCD Tool 2.1 | Criteria & Constraints | Phase 1 (Engage), Phase 2 (Testing) - Identifying requirements and limitations | List criteria: reliable tipping, holds multiple dice, button-activated, consistent action; constraints: servo torque limits, cup capacity, portability; discuss how constraints shape design decisions |
| HCD Tool 4.3 | Proof of Concept | Phase 2 (Building/Testing) - Creating functional prototype for testing | Emphasize that this IS a proof of concept - functional prototype to test with real dice and gather feedback; discuss what would come next in real development (user testing with James, refinement) |
| HCD Tool 5.2 | Results Analysis | Phase 2 (Testing), Extension Option A - Gathering performance data and user feedback | Structure testing: measure tipping angle, observe dice distribution, note consistency across trials; if possible, gather feedback from potential users about usability and reliability |
NGSS Science & Engineering Practices
| Code | Practice | Where Addressed | How to Emphasize |
|---|---|---|---|
| Practice 1 | Asking questions and defining problems | Phase 1 (Engage) - Understanding the motion transformation challenge James faces | Frame as engineering problem: "How can we transform rotary motion into linear tipping motion?" with criteria (reliable, consistent, button-activated) and constraints (servo capabilities, dice capacity) |
| Practice 2 | Developing and using models | Phase 2 (Building), Phase 3 (Explain) - Physical device models the motion transformation principle | Discuss how the physical prototype is a model demonstrating rack and pinion principles; use diagrams to model motion paths; emphasize that models help us understand and communicate complex systems |
| Practice 3 | Planning and carrying out investigations | Phase 2 (Testing) - Systematic testing of device performance with varying dice loads | Guide careful observation: test with 1, 3, 6, 10 dice; measure tipping angle; note consistency; collect data about speed and smoothness; document findings |
| Practice 5 | Using mathematics and computational thinking | Extension Option C or D - Code modifications or mechanical calculations | For code: discuss timing calculations and loop iterations; For mechanics: calculate linear distance per gear rotation, analyze gear ratios if using different tooth counts |
| Practice 6 | Constructing explanations | Phase 3 (Explain) - Explaining how rack and pinion transforms motion | Require cause-and-effect reasoning: "When the servo rotates the pinion gear clockwise, the gear teeth push against the rack teeth, forcing the rack to slide left, which tips the cup forward"; connect to mechanical principles (gear mesh, friction) |
| Practice 8 | Obtaining, evaluating, and communicating information | Phase 3 (Explain - using student guide content), Phase 5 (Evaluate - presentations) | Reference student guide "The Bigger Picture" content as information source; evaluate examples of rack and pinion in other contexts; present technical information using appropriate vocabulary and visuals |
NGSS Core Ideas
| Code | Core Idea | Where Addressed | How to Emphasize |
|---|---|---|---|
| ETS1 | Engineering Design | Throughout - especially Phase 1 (defining James's problem), Phase 4 (optimization), Phase 5 (evaluation) | Emphasize iterative process: define problem → design solution → build prototype → test → refine; discuss criteria (reliable tipping) and constraints (servo torque, device size); highlight optimization opportunities |
| ETS2 | Links Among Engineering, Technology, Science, and Society | Phase 1 (James's social context), Teaching Moment #4 (participation through independence) | Discuss how technology enables social participation; consider broader impacts of accessible recreation; connect mechanical engineering (rack and pinion) to social needs (independent game participation) |
NGSS Cross-Cutting Concepts
- Cause and Effect: Phase 2-3 - Servo rotation (cause) creates rack motion (effect) through gear mesh interaction; gear tooth geometry determines specific motion characteristics
- Systems and System Models: Phase 2-3 - Device as system with input (button), process (code → servo rotation → gear transformation), output (tipping motion); understanding component relationships
- Structure and Function: Phase 3 - Gear tooth structure enables precise motion transformation function; rack geometry allows linear sliding while resisting other motion
- Stability and Change: Phase 3 - Precision in gear mesh creates stable, repeatable motion; lubrication reduces friction while maintaining stability
STEL Standards
| Code | Standard | Where Addressed | How to Emphasize |
|---|---|---|---|
| STEL 1J | Develop innovative solutions for individual/collective needs | Phase 1-2 - Designing device to address James's specific need for independent dice rolling | Emphasize that this addresses a real need; discuss how similar devices could help others with limited grip strength; consider broader applications beyond dice rolling |
| STEL 1M | Apply creative problem-solving strategies | Phase 2 (Explore), Extension Option B - Using motion transformation to solve manipulation challenges | Highlight rack and pinion as creative solution to motion mismatch; encourage students to propose alternative mechanisms; value innovative approaches to similar challenges |
| STEL 1Q | Conduct research to inform design | Phase 1 (Engage), Phase 3 (using "The Bigger Picture" content) - Understanding motion transformation and James's needs | Make research purposeful: "We need to understand how gear teeth interact to make this reliable"; connect research findings directly to design decisions |
| STEL 2M | Understand system components (inputs, processes, outputs, feedback) | Phase 2 (Testing), Teaching Moment #3 - System analysis of dice roller | Explicitly label: input (button press), process (code execution → servo rotation → gear transformation), output (tipping motion), feedback (visual observation, dice result); trace flow through entire system |
| STEL 2S | Quantify technical concepts | Extension Option D - Calculating gear ratios, measuring angles, analyzing force | Connect numbers to real meaning: "This gear ratio means the cup tips 4 inches for every full servo rotation"; use calculations to make informed optimization decisions |
| STEL 2T | Use conceptual, graphical, and physical modeling | Phase 2-3 - Sketching motion paths (conceptual), labeled diagrams (graphical), functional device (physical) | Encourage students to sketch before building; create annotated diagrams showing motion transformation; use physical device to validate conceptual understanding |
| STEL 2W | Select resources balancing factors | Phase 2 (Building) - Material selection for racks, consideration of lubrication options | Discuss why plastic works for this application (light, low friction when lubricated, affordable); consider trade-offs in durability vs. cost; address waste through 3D printing efficiency |
| STEL 2X | Cite examples of criteria and constraints | Phase 1 (Engage), Phase 2 (Testing) - Identifying what device must do and limitations | Make explicit: criteria (hold multiple dice, tip consistently, button-activated, reliable); constraints (servo torque limits, 12T gear size, rack length, cup capacity); discuss how these shape design |
| STEL 3B | Combine simple technologies into complex systems | Phase 2-3 - Integrating servo, gears, programming, mounting into functional system | Highlight that final device combines multiple technologies: electrical (servo, power), mechanical (gears, racks), computational (code); discuss how integration creates new capability |
| STEL 3D | Employ technology for otherwise unsolvable problems | Phase 1 (Engage), Teaching Moment #4 - Technology enabling independent participation | Emphasize that James CAN roll dice with help, but technology enables INDEPENDENT participation; discuss how automation changes what's possible |
| STEL 3F | Apply solutions across settings | Extension Option A or B - Adapting design for different contexts or transfer applications | Discuss how same rack and pinion principle could work for different games, different dice types, or entirely different tipping/sliding challenges; identify what changes and what stays the same |
| STEL 3H | Transfer knowledge between technologies | Extension Option B - Applying motion transformation to new problems | Make connections explicit: "If you understand how we transformed rotation to linear motion here, you can apply that principle to page turners, drawer openers, or other assistive devices" |
| STEL 5G | Evaluate trade-offs in design decisions | Phase 3 (Explain), Phase 4 (Extension Option A) - Analyzing design choices and optimization | Consider trade-offs: faster tipping vs. controlled release, larger capacity vs. portability, precision vs. complexity; discuss why engineers must balance competing goals |
| STEL 7Q | Apply design process to solve problems | Throughout - entire kit follows design process from problem definition through testing | Make process visible: empathize (understand James), define (motion transformation needed), ideate (rack and pinion solution), prototype (build device), test (evaluate performance); emphasize iteration |
| STEL 7S | Apply human factors in design | Phase 1 (Engage), Teaching Moment #4, Phase 3 (connecting features to user needs) | Center James's physical capabilities (button activation he can manage), cognitive needs (simple, predictable operation), and social context (independence in group settings); discuss accessibility principles |
| STEL 7Z | Apply human-centered design principles | Throughout - especially Phase 1 (empathy), Phase 5 (reflection on user impact) | Emphasize that design starts with understanding James's full context; technical decisions must serve user needs; measure success by impact on James's experience, not just technical function |
Sample Assessment Rubric
Performance Demonstration - Technical Explanation & User Focus
| Criterion | Developing | Proficient | Advanced |
|---|---|---|---|
| Assembly Accuracy | Device incomplete or has significant mechanical issues (gears don't mesh properly, racks bind, inconsistent tipping) | Device fully assembled and functional with proper gear mesh, smooth rack motion, and consistent tipping action | Device assembled with attention to precision (optimal lubrication, minimal backlash, refined tipping angle), demonstrating advanced troubleshooting |
| Motion Transformation Understanding | Describes device operation but struggles to explain how rotary motion becomes linear motion | Accurately explains rack and pinion mechanics using correct vocabulary (rotary/linear motion, gear mesh, transformation) | Explains motion transformation with sophisticated understanding, connecting gear geometry to specific motion characteristics and discussing precision/reversibility advantages |
| Technical Vocabulary | Uses everyday language with few technical terms; may misuse terms like "spinning" for all motion types | Uses key technical terms correctly (rack, pinion, linear motion, rotary motion, gear mesh); defines terms when explaining | Uses technical vocabulary precisely and naturally throughout explanation; seamlessly integrates terms while explaining complex concepts; teaches vocabulary to others effectively |
| User-Centered Connection | Mentions that device helps James roll dice but doesn't connect technical features to specific needs | Explains how specific features address James's needs (button activation for limited grip, consistent tipping for independence) | Analyzes design from James's full perspective (physical, social, emotional dimensions); discusses trade-offs with user impact in mind; proposes context-specific optimizations based on game scenarios |
| Systems Thinking | Focuses on isolated components without connecting them as an integrated system | Identifies system components (input, process, output) and traces basic flow through the device | Demonstrates sophisticated systems understanding: traces complete flow, explains component interactions, discusses feedback mechanisms, considers optimization at system level |
Alternate Focus Areas
(choose 3-4 based on your priorities)
| Criterion | Developing | Proficient | Advanced |
|---|---|---|---|
| Problem-Solving & Iteration | Struggles with troubleshooting; seeks help immediately when issues arise | Troubleshoots systematically using provided resources; documents what was tried | Demonstrates advanced debugging skills; develops novel solutions to unexpected challenges; helps peers troubleshoot |
| Documentation Quality | Incomplete or unclear documentation; missing key steps or observations | Clear documentation with appropriate detail; includes observations from testing; uses technical vocabulary | Exceptional documentation serving as reference for others; includes annotated diagrams, thoughtful analysis, and optimization recommendations |
| Testing Methodology | Tests informally without systematic approach or documentation | Conducts systematic testing with varying conditions (different dice quantities); records observations | Designs comprehensive testing protocol; collects quantitative data; analyzes results to inform optimization decisions |
| Design Reasoning | Makes choices without clear justification or relies only on instructions | Justifies design decisions with clear reasoning based on user needs or mechanical principles | Provides sophisticated justification considering multiple factors; discusses alternatives and explains why chosen approach is optimal for context |
Key Vocabulary
Students should be able to define and use these terms:
Motion Transformation: The engineering challenge of converting one type of motion into a different type needed for a specific task.
Example: The dice roller transforms the servo's rotary motion (spinning) into the linear motion (straight-line tipping) needed to pour out dice.
Rotary Motion: Circular or spinning movement around a central axis or point.
Example: The Smart Servo produces rotary motion when its motor shaft spins to different angles.
Linear Motion: Movement in a straight line from one point to another.
Example: The racks move in linear motion (sliding straight forward and back) even though they're driven by circular gear rotation.
Rack and Pinion: A mechanical system where a circular gear (pinion) meshes with a straight, toothed bar (rack) to transform rotary motion into linear motion.
Example: Your dice roller uses rack and pinion mechanics - the 12T drive gear (pinion) rotates against the toothed racks to create tipping motion.
Gear Mesh: The interlocking contact between gear teeth that allows force and motion to transfer from one gear to another.
Example: Proper gear mesh in your device ensures the drive gear teeth fit tightly with the rack teeth, preventing slipping and creating precise, predictable motion.
Precision: The quality of being exact, accurate, and consistent in measurement or operation.
Example: The rack and pinion system provides precision because the gear teeth lock together, ensuring James gets the same tipping action every time he presses the button.
Backlash: Unwanted looseness or play in a mechanical system, often causing imprecise or inconsistent motion.
Example: Proper gear mesh minimizes backlash - if the teeth were too loose, the cup might wobble instead of tipping smoothly.
Reversibility: The ability of a mechanical system to move in both directions, returning to its starting position.
Example: The rack and pinion system is reversible - the servo can rotate clockwise to tip forward, then counterclockwise to return to the starting position.
Lubrication: A substance (like soap in this project) applied to reduce friction between moving parts.
Example: Adding soap to the surfaces where the racks slide against the rack cover reduces friction, allowing smooth motion throughout the full range.
Compliant Assembly: A design approach where parts flex slightly during assembly to snap into position.
Example: The racks are compliant assemblies - they flex when you press them onto the rack cover, then spring into their locked position.
Notes & Customization
What Worked in My Class:
[Space for teacher notes]
Adaptations I Made:
[Space for teacher notes]
Timing Observations:
[Space for teacher notes - e.g., "Assembly took longer than expected due to gear meshing challenges," "Students needed more time for optimization and testing"]
Student Insights or Innovations:
[Space for teacher notes - e.g., "One group discovered that adjusting the tilt cup angle before securing screws improved dice distribution," "Students suggested adding a collection tray for rolled dice"]
Common Struggles & Solutions Found:
[Space for teacher notes]
Extension Activities That Worked Well:
[Space for teacher notes]
For Next Time:
[Space for teacher notes - e.g., "Pre-lubricate rack covers before class to save time," "Prepare video showing car steering rack and pinion," "Invite guest with mobility limitations to discuss assistive technology"]
Cross-Curricular Integration Opportunities:
[Space for teacher notes - e.g., "Coordinated with math teacher on gear ratio lesson," "Connected to social studies unit on disability rights"]
Smart Servo Lesson Structure v5.0 | Designed to support teacher autonomy while providing comprehensive guidance
ADDITIONAL TEACHING NOTES
Suggested Lesson Pacing
While specific time requirements vary by class, consider this general structure:
Day 1 (45-60 min): Engage phase and begin building
- Client introduction and challenge discussion (10-15 min)
- Component identification and preparation (Steps 1-3) (10-15 min)
- Begin assembly through Step 6 (rack press-fit) (20-30 min)
Day 2 (45-60 min): Complete building and initial testing
- Complete assembly (Steps 7-11) (20-30 min)
- Initial testing with Teaching Moment #3 (15-20 min)
- Begin observations and documentation (10-15 min)
Day 3 (45-60 min): Explain phase and deeper exploration
- Process building experience and introduce vocabulary (15-20 min)
- Explore motion transformation concepts using guide content (20-25 min)
- Connect to real-world applications and James's specific needs (10-15 min)
Day 4 (Optional - 45-60 min): Extension activities
- Choose extension option(s) based on class goals
- Work time with circulation and guidance
- Sharing of insights or innovations
Day 5 (45-60 min): Evaluate and reflect
- Assessment activity (chosen method from page 4)
- Reflection prompts and discussion
- Connection to upcoming kits or broader themes
Differentiation Strategies
For students who need additional support:
- Pair students strategically for peer support during assembly
- Provide pre-labeled diagrams showing motion types and component names
- Offer sentence frames for technical explanations: "The servo produces ___ motion. The rack and pinion transforms this into ___ motion because..."
- Break assembly into smaller checkpoints with verification before proceeding
- Provide video demonstrations of gear meshing technique
For students who need additional challenge:
- Encourage independent exploration of gear ratio calculations
- Challenge students to design alternative motion transformation mechanisms
- Ask students to research and present on rack and pinion applications in specific industries
- Have students mentor peers while deepening their own understanding through teaching
- Extend to multi-axis systems or compound gear trains
For English Language Learners:
- Provide visual vocabulary cards with images of motion types
- Use physical demonstration extensively before introducing vocabulary
- Allow demonstration of understanding through labeled diagrams or physical modeling
- Provide sentence frames and word banks for written responses
- Partner with strong English speakers for collaborative work
Connections to Sequence
This Kit in Context:
Linear Motion (Kit 5) builds on skills from earlier kits while introducing new mechanical principles. Students should already be comfortable with basic servo control, threading operations, and user-centered thinking. The motion transformation concept introduced here becomes foundational for understanding more complex mechanisms in later kits.
Before This Kit:
Students likely completed kits introducing mounting systems, simple mechanisms (possibly gears in Kit 3 if following sequence), and basic assistive technology applications. They understand servo capabilities and limitations.
After This Kit:
Future kits may explore compound mechanisms, multi-axis control systems, or integration of sensors. The motion transformation principle learned here transfers to understanding how complex machines coordinate multiple motion types to accomplish sophisticated tasks.
Cumulative Skills Being Reinforced:
Iterative testing and refinement, connecting technical features to user benefits, systematic troubleshooting, threading/tapping operations, documentation of design decisions, translating client needs into technical requirements.
Cross-Curricular Connections
Mathematics
Gear ratios and proportional relationships in the rack and pinion system (number of teeth, rotation angle to linear distance). Measurement and optimization during testing (tipping angle, distance traveled, timing). Geometric analysis of motion paths and positioning.
Science
Forces and motion (NGSS): transformation of rotary force to linear force through mechanical advantage. Friction as both challenge (requires lubrication) and necessity (provides grip in gear mesh). Energy transfer through mechanical systems from electrical input to physical motion.
Social Studies
ADA requirements for accessible recreation and gaming equipment. History of assistive technology development and disability rights movement. Social model of disability - barriers to participation created by environment/design rather than by people.
English/Language Arts
Technical writing in documentation and user instructions. Persuasive writing in design proposals and optimization recommendations. Client communication requiring translation of technical concepts to accessible language.
Additional Resources
For Teachers:
- Student Guide: Linear Motion: Game Assistance Kit (included with kit materials)
- 3D Printing Files: tinyurl.com/SS-STL-DICE
- Code Snippets: tinyurl.com/SmartServoSnips
- Motion transformation videos: Search for "rack and pinion animation" or "car steering mechanism cutaway"
- Gear mechanics demonstrations: Available through physics/engineering education sites
For Students:
- Assembly: Detailed instructions in student guide Steps 1-11
- Concepts: "The Bigger Picture" section on motion transformation and rack and pinion applications
- Troubleshooting: Quick reference in educator guide page 3; student guide Step 11 testing guidance
- Code adjustments: Student guide references delay and steps variables for optimization
Extension Reading/Resources:
- Age-appropriate articles on accessible gaming and recreational equipment
- ADA guidelines for recreation facilities and equipment (simplified for this age group)
- Information on brachial plexus injuries and adaptive equipment
- Videos of other motion transformation mechanisms (cams, lead screws, linkages)
- Examples of rack and pinion in everyday devices students can observe
**End of Educator Guide**